




Projects
This page is where the club shares their individual and club projects.
Club Github Repository link – https://github.com/CentralIllinoisRoboticsClub
Wheel-E Control Panel
In December of 2020, CIRC started building a control panel for Wheel-E, the club Robomagellan robot. Born out of a brainstorming session from Summer 2020, the original rough concept was for a touchscreen/display with a few simple functions, such as a safe shutdown feature for powering off Wheel-E’s raspberry pi. We envisioned the display bolted into Wheel-E’s chassis and communicating with the pi over a serial link such as CAN or SPI.
It might be an understatement to say that the original project concept has evolved since those early days. During Winter ‘21, Matt put together an initial working concept using an old Arduino board he had laying around (Chipkit Max32), plus a new 3.2“ TFT LCD screen with resistive touchscreen from Adafruit. After showing off this initial prototype to club members, the brainstorming really took off. From the original idea of an on-board touchscreen with a few simple functions, we landed on a handheld touchscreen device communicating wirelessly with Wheele over a LoRa datalink. Now we wanted to be able to drive Wheel-E around by virtual joystick via the wireless touchscreen while mapping out GPS routes, then flip over to autonomous mode and let Wheel-E roam.
In May of ’21, we had a nice proof of concept demonstration at a club build session. With the display connected to a laptop via USB, we were able to forward command velocity data from the touchscreen into Wheel-E’s ROS control infrastructure, and drive the ‘bot around Mike’s driveway.
During Summer and Fall of ‘21, the project solidified into a more stable programmable display platform. The old Chipkit Max32 Arduino was replaced with a more modern Adafruit Feather M0 (48MHz ARM CortexM0 CPU), which includes a 900MHz LoRa radio module on-board. Matt was able to spend some time getting a better software architecture in place, to be able to keep up with the flow of brainstorming ideas that inevitably come out of CIRC build sessions. And Tom put his 3D printer through its paces, coming up with several concepts for an ergonomic handheld device that would contain the display and associated electronics/battery.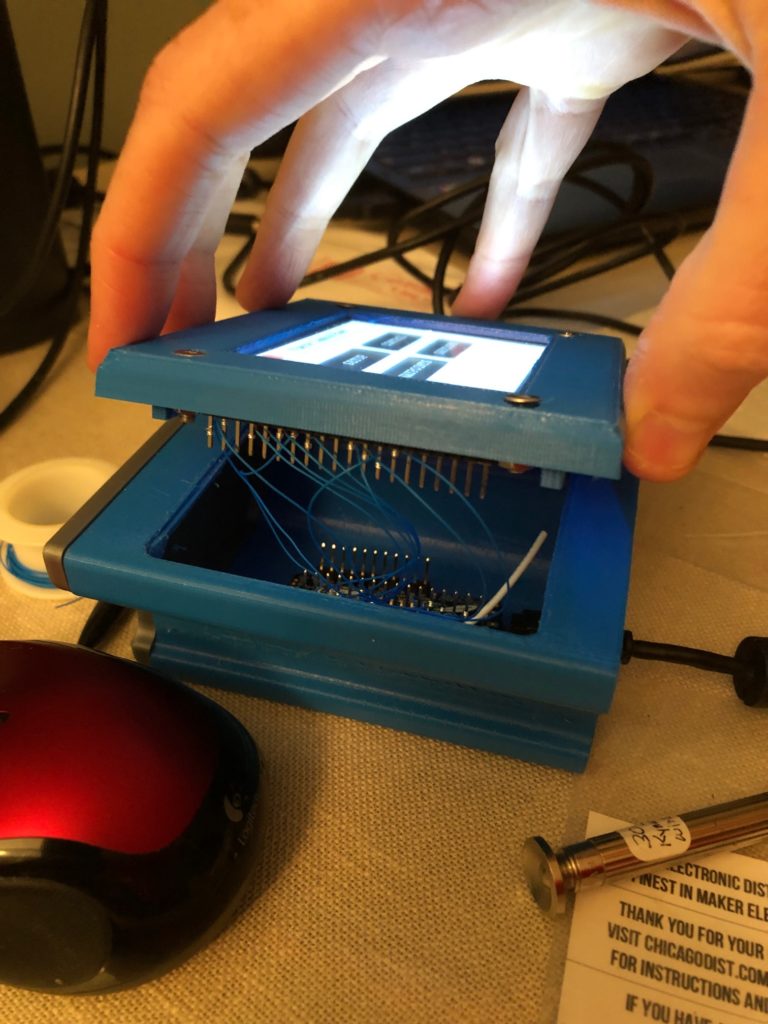
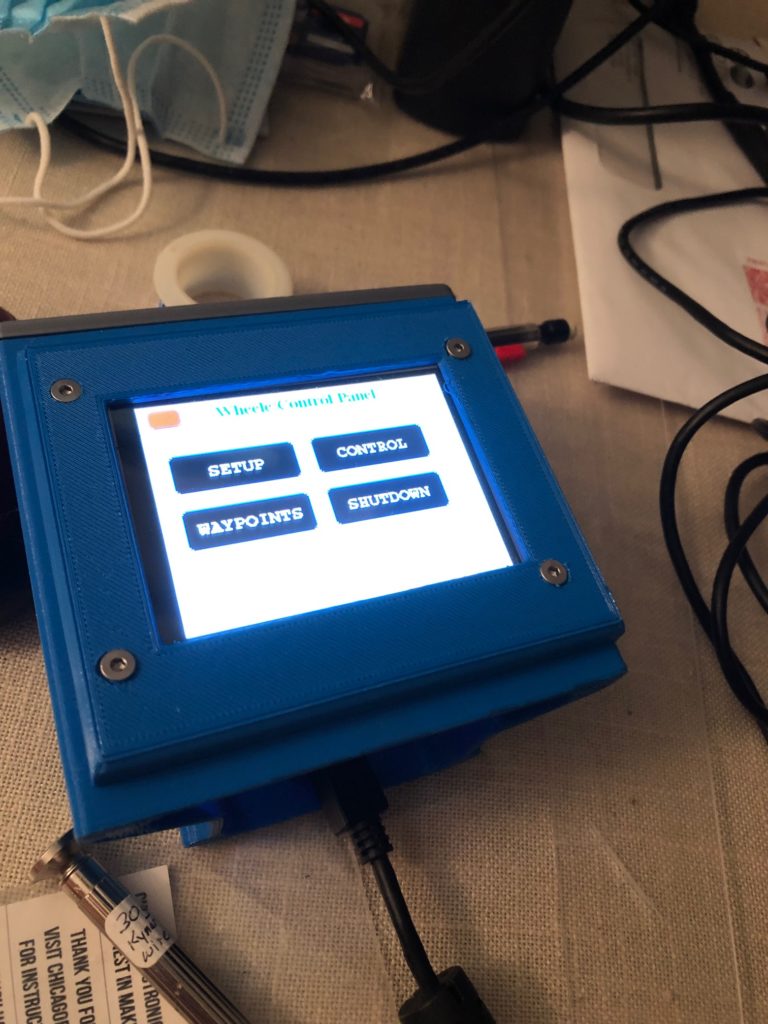
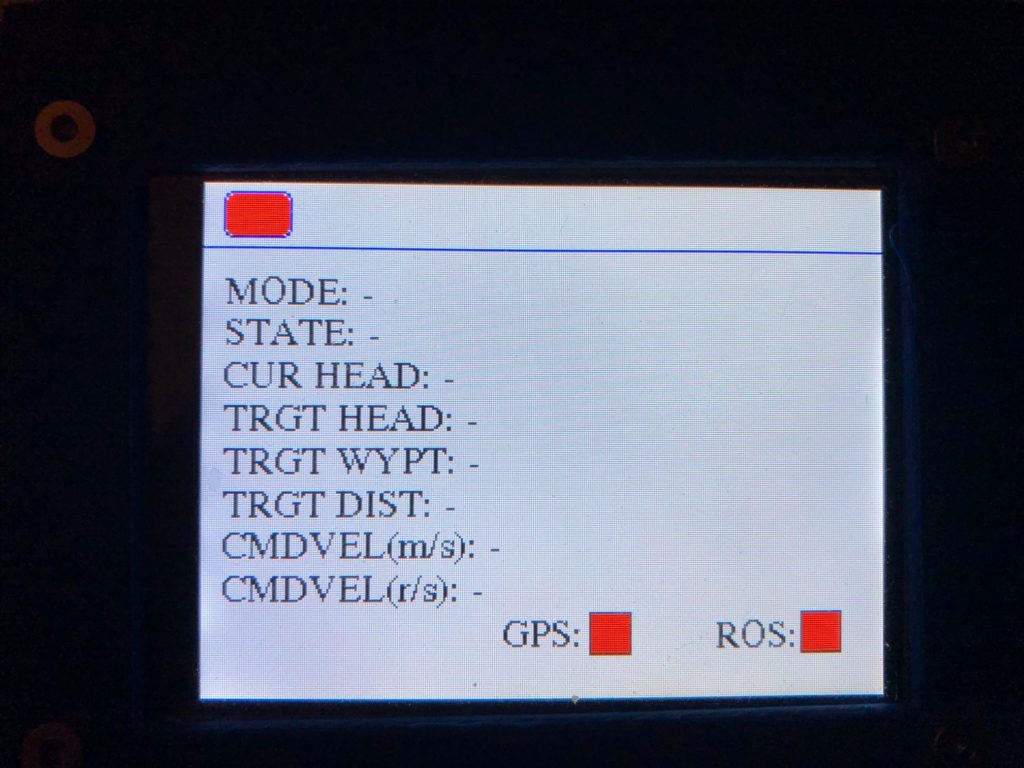
Current status as of May ‘22, the touchscreen has a functional menu system that is relatively easy to add/extend with new ideas as they come up at build sessions. A GPS unit is installed and displays current position. Support needs to be added to save waypoints for Wheel-E to follow. The biggest outstanding feature at the moment is to demonstrate the LoRa wireless link. Based on some early prototyping, the LoRa functionality on the display is more or less functional. To complete the concept for a working demo, a LoRa module needs to be added on-board Wheel-E with some basic message encoding/decoding and forwarding over Wheel-E’s CAN datalink.
Follow along! We archive source code and track issues for the touchscreen here: https://github.com/CentralIllinoisRoboticsClub/wheele_gui
September 13, 2022 at 9:35 pm | Projects | No comment
Josh Jacob’s Meccatana Project – G15B
Josh is working on a humanoid type of robot. He has a lot going into this creation of his. He is merging Meccano’s Meccanoid G15 Robot with Microsoft’s Cortana AI and Intel RealSense. Here is a link his web page for this project.
February 21, 2017 at 11:59 am | Announcements, Projects | No comment
Wheel-E Meeting Will Happen
The start of the new year has been a challenge for Wheel-E. We have run into a stretch of people’s schedules not aligning properly, which has postponed the first meeting of the year to continue work on our venerable RoboMagellan robot. The meeting will happen one of these weeks. The plan now is to meet on Wednesday, February 1, 2017 at AutonomouStuff starting at 5:00 PM. (We schedule these meetings week to week as people are able and willing to attend.)
January 26, 2017 at 10:37 am | Projects | No comment
Work on Wheel-E is continuing!
For the past 6 months we have been working on an update to Wheel-E based on the Polysync framework, and programmed in C/C++. The components are similar to Wheel-E 2.1 (as described in the 2012 RoboMagellan Update on the CIRC website), with the following changes:
- Replaced the Netbook running Windows 7 with two Raspberry Pi 3 boards running Linux/Polysync (one RPi3 is the main controller, and the other does vision processing)
- Replaced the Maxbotix ultrasonic sensors with a LeddarTech multi-element sensor module for obstacle detection
We are in the process of re-writing the software. Currently the remote control functionality is working, but all of the vision and autonomous control still needs done. Build sessions will resume January 25.
January 4, 2017 at 6:33 pm | Projects | No comment
2012 RoboMagellan Update
Wheel-E V2.1 competed at the 2012 Chibots SRS RoboMagellan Competition on August 4th and won 2nd place! Several updates were made since the 2011 year including replacing the Mini ITX computer with a Dell Netbook, replacing the GPS and Compass with an ArduPilot board, and upgrading from Nimh batteries to 4S LiPoly packs. A huge thanks again to SolidWorks and MaxBotix Ultrasonic Rangefinders for their continued support of this project! While Wheel-E was able to successfully complete the course once, our other 2 runs did not go as well due to compass accuracy problems and the lack of functional object detection. We’ll return next year with these problems hopefully remedied.

Recorded GPS track for Wheel-E’s 2nd place run at 2012 Chibots SRS RoboMagellan Competition
Wheel-E 2.1 Components:
- Dell Inspiron Mini 1012 netbook with Intel Atom N450 CPU and 1 GB RAM running 32-bit Windows 7 Professional
- Atmel AVR-based controller for sensor input and motor control
- Two Turnigy 4-cell 25C 14.8 V 5000 mAh Li-Po batteries in parallel for 10 AH total capacity
- Parallax HB-25 electronic speed controllers (2)
- ML-3506 Planetary Gearmotors (2)
- CUI encoders (2)
- Suspension from a Traxxas T-Maxx RC truck in differential drive configuration
- Pro-Line Road Rage Tires with Traxxas Dished Hubs (4)
- Chassis designed using SolidWorks 3D CAD design software
- Custom machined polycarbonate parts fabricated using a Probotix Comet CNC router
- Custom aluminum and plastic parts fabricated using Sherline CNC lathe and milling machine and a MakerBot Replicator 3D printer
- MicroRAX aluminum extrusions for chassis lid and netbook mount
- ArduPilot Mega 2.0 for GPS and compass
- MaxBotix ultrasonic rangefinders for obstacle detection (4)
- Cone detection using a Logitech C310 HD webcam on a Lynxmotion pan-and-tilt assembly
- Programmed using Microsoft Visual Basic 2008 Express and RoboRealm
- Belkin Wi-Fi for sending telemetry to base station laptop
- Spektrum 2.4 GHz RC transmitter and receiver for safety stop switch
August 4, 2012 at 8:40 am | Projects | 1 comment
RoboMagellan Update 2
Wheel-E V2.0 competed at the 2011 Chibots SRS RoboMagellan Competition on August 6th. He was well equipped with numerous upgrades including a brand-new custom chassis designed using SolidWorks, MaxBotix ultrasonic rangefinders for object detection, and a new GPS unit. Wheel-E v2.0 was ultimately unable to complete the course but the CIRC team learned a great deal and is anxious to return again next year after more testing and troubleshooting. (more…)
October 1, 2011 at 11:25 am | Projects | No comment
RoboMagellan Update 1
Wheel-E v1.5 competed at the Chibots Summer RoboMagellan competition today. He put forth a valiant effort but ultimately was unable to complete the course due to GPS inaccuracies, limited obstacle detection abilities, and a nasty fall during one run which damaged the GPS receiver. Wheel-E v2.0 is already in development and will be ready for next year’s competition! (more…)
July 25, 2010 at 11:22 am | Projects | No comment
RoboMagellan Overview
The RoboMagellan competition was created by the Seattle Robotics Society in part as a low-cost alternative to the DARPA grand challenge. Intrigued by the idea of vehicles that can autonomously navigate outdoor environments, the group devised a competition in which robots navigate between GPS waypoints through a college park type environment. During their run (more…)
February 21, 2010 at 11:15 am | Projects | No comment